 HKUST
HKUST CSE Dept
CSE Dept
Computer Science Interactive Learning Objects
Edge Learning Objects
The learning objects listed below explain some of the most common edge detection algorithms and how they are implemented. The algorithms included here are:
- 4 & 8 neighbors
- Sobel
- Laplace
- Roberts
- Prewitt
- Kirsch
- Frei & Chen
- Robinson 3-Level
- Robinson 5-Level
- Max-Min
- Canny
4 & 8 neighbors
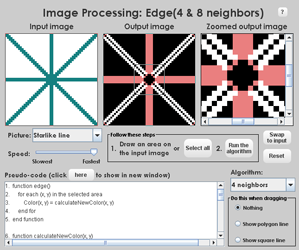
This learning object explains the 4 & 8 neighbors edge detection algorithm.
Click here to try the learning object »
Sobel
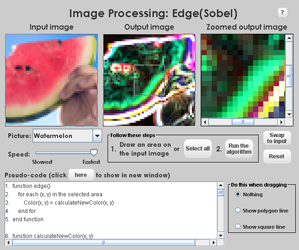
This learning object explains the Sobel edge detection algorithm.
Click here to try the learning object »
Laplace
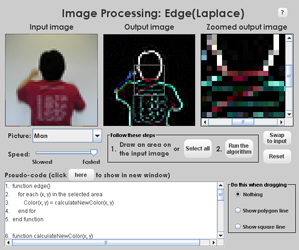
This learning object explains the Laplace edge detection algorithm.
Click here to try the learning object »
Roberts
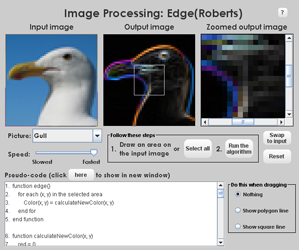
This learning object explains the Roberts edge detection algorithm.
Click here to try the learning object »
Prewitt
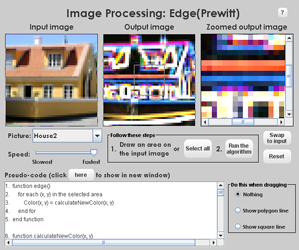
This learning object explains the Prewitt edge detection algorithm.
Click here to try the learning object »
Kirsch
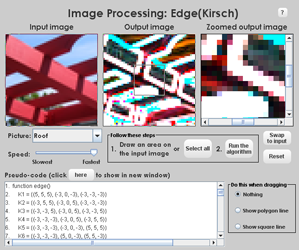
This learning object explains the Kirsch edge detection algorithm.
Click here to try the learning object »
Frei & Chen
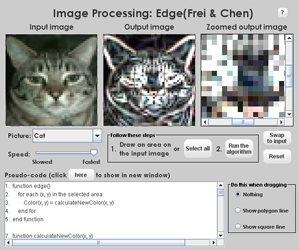
This learning object explains the Frei & Chen edge detection algorithm.
Click here to try the learning object »
Robinson 3-Level
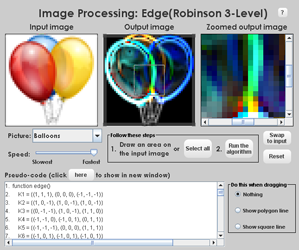
This learning object explains the Robinson 3-Level edge detection algorithm.
Click here to try the learning object »
Robinson 5-Level
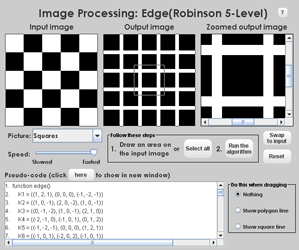
This learning object explains the Robinson 5-Level edge detection algorithm.
Click here to try the learning object »
Max-Min
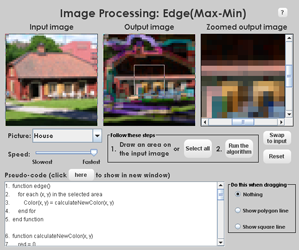
This learning object explains the Max-Min edge detection algorithm.
Click here to try the learning object »
Canny
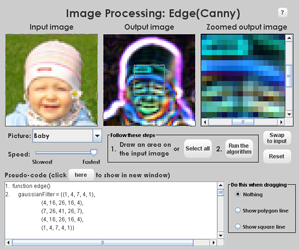
This learning object explains the Canny edge detection algorithm.